点播式网络研讨会
传感器深度融合以感知和导航复杂真实世界驾驶场景
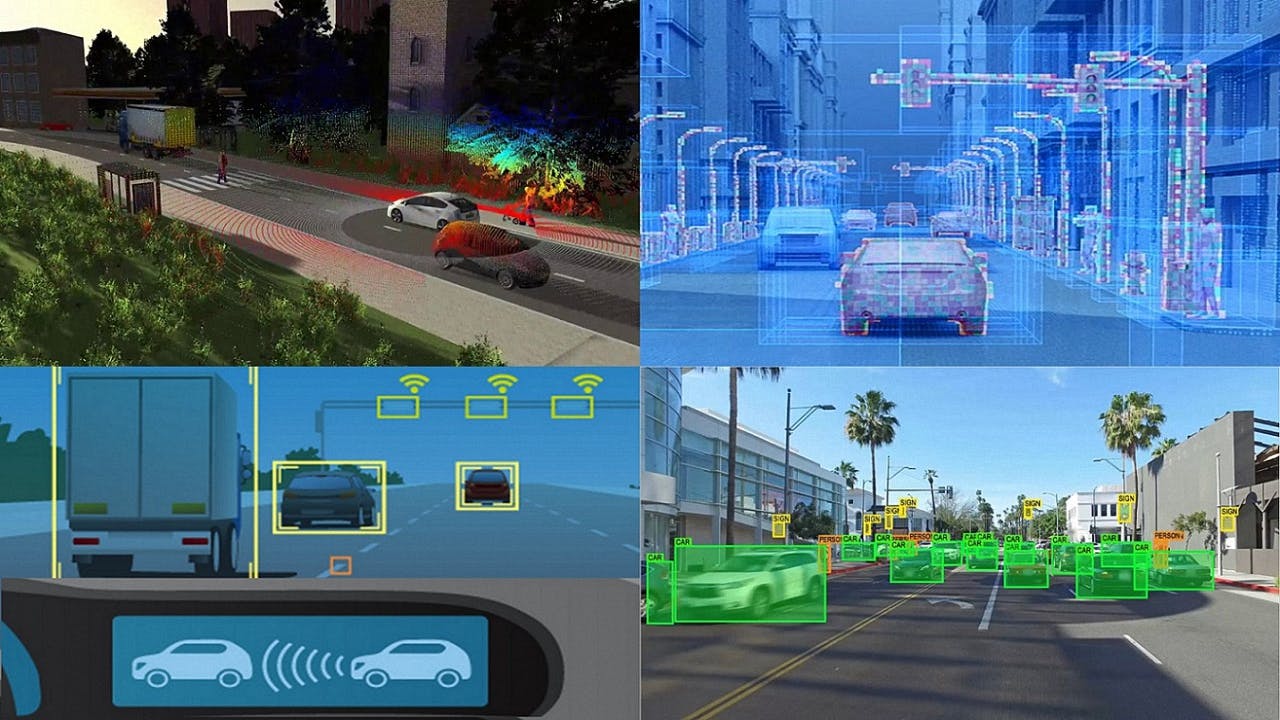
自动驾驶车辆使用多种传感器感知驾驶场景。传感器融合充分利用机器学习功能并将多模态传感器数据与精确理解驾驶环境结合起来。这种场景理解随后用于自适应地学习真实驾驶行为和交通模式。
在本次网络研讨会中,我们的专家将讲解如何通过传感器融合和深度学习实现精确的场景理解和导航。
示例包括:
- 多重传感器、多重对象检测与追踪、定位与映射
- 使用深度学习技巧(模仿学习、强化学习)实现场景可视化以培训驾驶策略
- 虚拟场景生成和基于仿真的验证
演讲人:
主讲嘉宾简介
Siemens Digital Industries Software
François Gerard
业务发展工程服务总监