Tecnomatix
Process Simulate Robotics & Automation
设计、规划、模拟和优化机器人和自动化制造流程和系统,包括具有可变生产组合的高度自动化工厂,从单个工作单元到整条生产线。
机器人虚拟调试使用机器人仿真来验证真实的控制系统行为。
机器人虚拟调试确认机器人系统在将控制程序下载到实际设备之前将按预期工作。这样就可以在部署之前采取纠正措施,从而消除物理系统上的调试和返工。
在数字环境中全面测试和调试自动化控制逻辑和 PLC 代码,大幅减少在生产车间量产期间和部署后进行大量调试的需要。
在容易修复时,识别并解决自动化控制逻辑、安全联锁和 PLC 代码中的潜在问题,从而降低启动前调试、故障排除和返工的总体成本。
以虚拟和远程方式提供操作员指导、实践和技能发展,无需硬件、物理存在或传统教室设置。
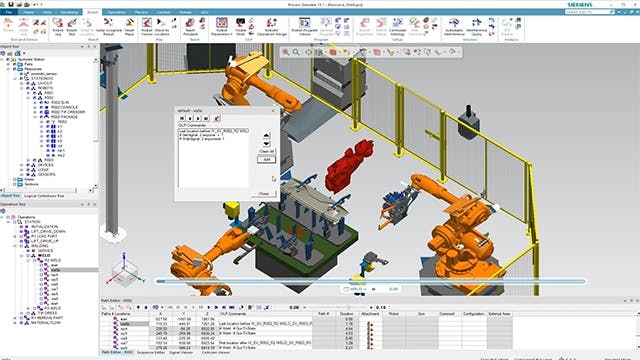
机器人虚拟调试模拟的不仅仅是机器人本身。使用数字孪生,机器人仿真软件将所有相关设备、器械和结构整合到同一个 3D 交互式表示中。现代机器人仿真软件是“与机器人无关的”,这意味着它适用于任何品牌的机器人。它还支持同一工作区域中的多个机器人。
虽然机器人仿真包括虚拟硬件,但某些仿真可能涉及实际硬件。例如,可编程逻辑控制器 (PLC) 等硬件控制设备可能连接到仿真模型,以查看系统的反应情况。在此配置中,仿真测试来自 PLC 的实际控制输入和来自仿真模型的反馈。
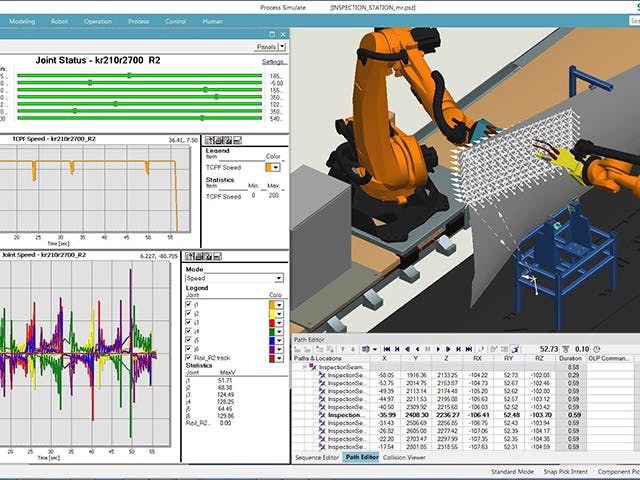
在机器人虚拟调试期间,工程师创建场景来验证机器人离线编程是否创建了可行且高效的程序。可以验证覆盖面和周期时间。机器人虚拟调试通常还会运行基于事件的模拟,以确保突发事件正常工作。
虚拟调试是机器人虚拟调试的一个关键功能。该软件使用户能够在数字环境中调试自动化控制逻辑和PLC代码。当物理机器人系统在生产车间构建后才进行调试时,所有调试都必须在部署后执行,这意味着生产会长时间停工。相比之下,当机器人虚拟调试软件执行调试操作时,部署和现场生产之间的时间大大缩短。