Symulacja robotyki to cyfrowe narzędzie wykorzystywane do projektowania zautomatyzowanych systemów produkcyjnych opartych na robotyce. Pod względem funkcjonalnym symulacja robotyki wykorzystuje cyfrową reprezentację – cyfrowego bliźniaka – aby umożliwić dynamiczną interakcję z modelami robotyki w środowisku wirtualnym. Robotyka i systemy symulacji automatyzacji mają na celu szybsze uruchomienie systemów automatyki i uruchomienie produkcji z mniejszą liczbą błędów niż w przypadku konwencjonalnej inżynierii automatyzacji.
Symulacja automatyzacji odgrywa kluczową rolę w robotyce, ponieważ pozwala na kosztowne i czasochłonne eksperymenty na rzeczywistych robotach, a tym bardziej na przeprowadzanie eksperymentów na hali produkcyjnej. Symulacja robotyki pozwala inżynierom wypróbowywać pomysły i konstruować scenariusze produkcyjne w dynamicznym środowisku wirtualnym, zbierając wirtualne dane reakcji, które dokładnie odzwierciedlają fizyczne reakcje systemu sterowania.
Symulacja robotyki stale ewoluowała, aby nadążyć za rosnącymi możliwościami robotów przemysłowych. Roboty są wdrażane w dynamicznych środowiskach, w których zadania robota często się zmieniają lub angażują ludzi. Zapotrzebowanie na zaawansowaną robotykę stale rośnie, ponieważ producenci zwiększają złożoność, różnorodność i dostosowanie produktów, aby sprostać wymaganiom klientów. Zaawansowana robotyka obejmuje podejmowanie decyzji w czasie wykonywania, programowanie reaktywne na nieprzewidziane zdarzenia oraz zdolność do adaptacji i ulepszania w oparciu o dane zebrane przez przemysłowy internet rzeczy (IIoT) przetwarzane za pomocą sztucznej inteligencji (AI). Poziom złożoności zaawansowanego programowania robotyki oraz wdrażania i obsługi zaawansowanych robotów, a także wysokie koszty, które musiałyby zostać poniesione w celu debugowania systemu robotyki na hali produkcyjnej, sprawiają, że zaawansowana symulacja robotyki jest krytycznym elementem inżynierii produkcji.
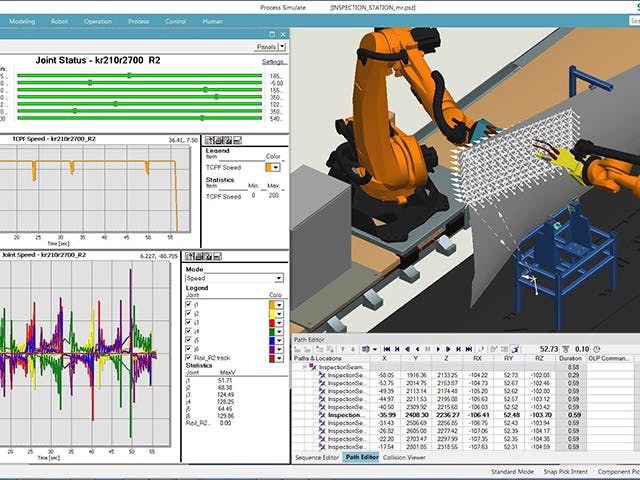
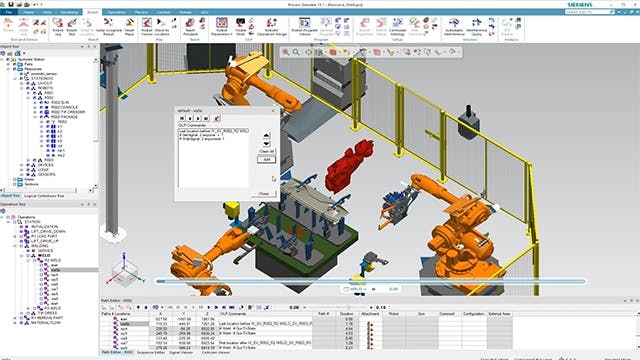
Zaawansowane oprogramowanie do symulacji robotyki umożliwia użytkownikom projektowanie i optymalizację zrobotyzowanej produkcji, która obejmuje nową elastyczność i możliwość dostosowania do potrzeb klienta dzięki zaawansowanym technologiom robotyki. Inżynierowie mogą wykorzystać zaawansowaną symulację robotyki do zaprojektowania kompletnych zrobotyzowanych komórek roboczych 3D, a następnie zweryfikować i zoptymalizować sekwencje procesów produkcyjnych symulujących realistyczne zachowanie i reakcje. Mogą cyfrowo weryfikować koncepcje automatyzacji i wykonywać zaawansowane programowanie robotyki w trybie offline. To oprogramowanie symulacyjne umożliwia również firmom wirtualne uruchamianie kompletnych systemów produkcyjnych.
Powiązane produkty: Planowanie i symulacja robotyki | Symulacja procesu Tecnomatix