온디맨드 웨비나
복잡한 실제 주행 상황 인식 및 탐색을 위한 심층 센서 융합
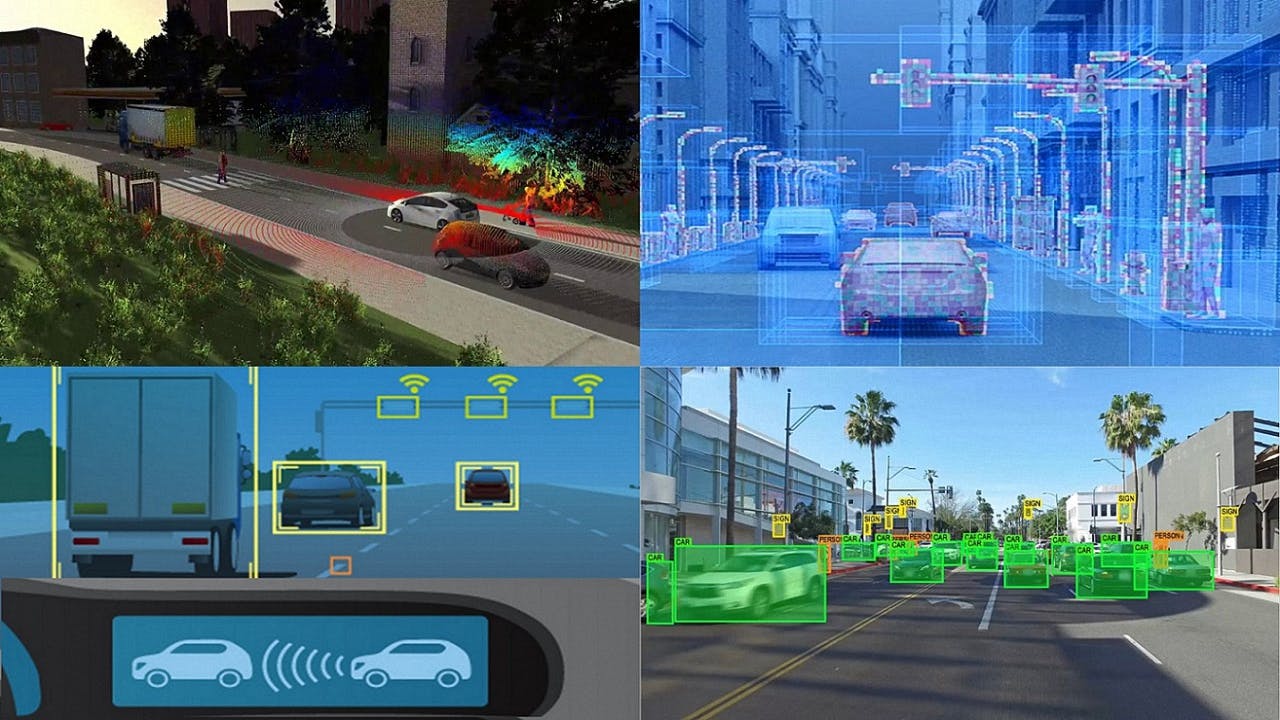
자율 주행 자동차는 여러 센서를 사용해 주행 상황을 인식합니다. 센서 융합은 머신 러닝을 활용하며, 다중 모드 센서 데이터를 정확한 주행 환경 파악에 통합합니다. 그 다음 상황 분석을 사용해 현실적인 주행 행동과 교통 패턴을 적응식으로 학습합니다.
본 웨비나에서는 전문가가 센서 융합과 딥 러닝을 사용해 정확한 상황 파악 및 탐색을 구현할 수 있는 방법을 소개합니다.
예:
- 다중 센서, 다중 물체 감지 및 추적, 위치 파악 및 매핑
- 딥 러닝 기법 (모방 학습, 강화 학습)을 사용한 주행 방식 교육을 위한 장면 시각화
- 가상 시나리오 생성 및 시뮬레이션 기반 검증
발표자:
발표자 소개
Siemens Digital Industries Software
François Gerard
Director Business Development Engineering Services