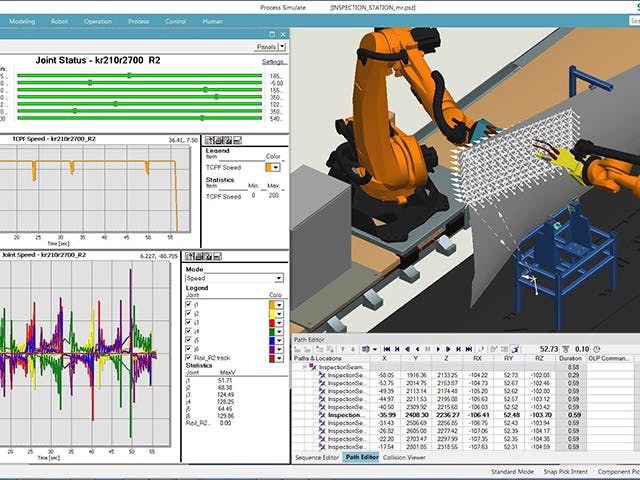
로보틱스 가상 커미셔닝은 물리적 로보틱스 시스템이 아닌 자동화 시뮬레이션 환경을 사용하여 실제 제어 소프트웨어를 기반으로 시스템의 동작을 테스트합니다. 로보틱스 가상 커미셔닝은 생산 현장 배포 및 시운전에 앞서 수행됩니다. 이는 로봇 시뮬레이션 소프트웨어의 여러 기능 중 하나입니다.
로보틱스 가상 커미셔닝은 로보틱스 시스템과 주변 생산 환경을 인터랙티브하게 가상으로 표현한 디지털 트윈을 사용하여 로보틱스 시스템의 계획 및 프로그래밍된 작동을 시뮬레이션합니다. 이를 통해 제조 엔지니어는 현재 생산 작업을 중단하지 않고 오프라인 로봇 프로그래밍을 수행하고 테스트할 수 있습니다.
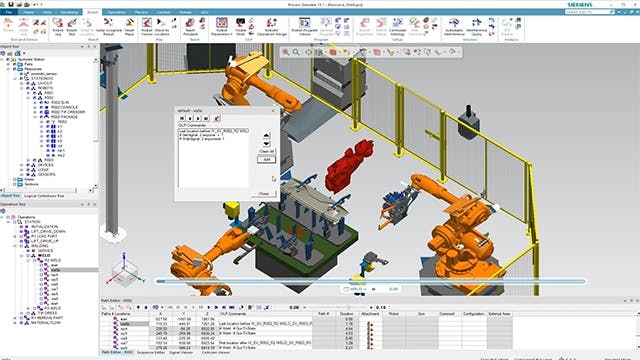
로보틱스 가상 커미셔닝은 물리적 로보틱스 시스템이 아닌 자동화 시뮬레이션 환경을 사용하여 실제 제어 소프트웨어를 기반으로 생산 현장에 배치하고 시운전하기 전에 시스템의 동작을 테스트합니다. 이는 로봇 시뮬레이션 소프트웨어의 여러 기능 중 하나입니다.
관련 제품: Tecnomatix 공정 시뮬레이션