オンデマンド・ウェビナー
実世界の複雑な運転シーンの認識およびナビゲーションのための深層センサーフュージョン
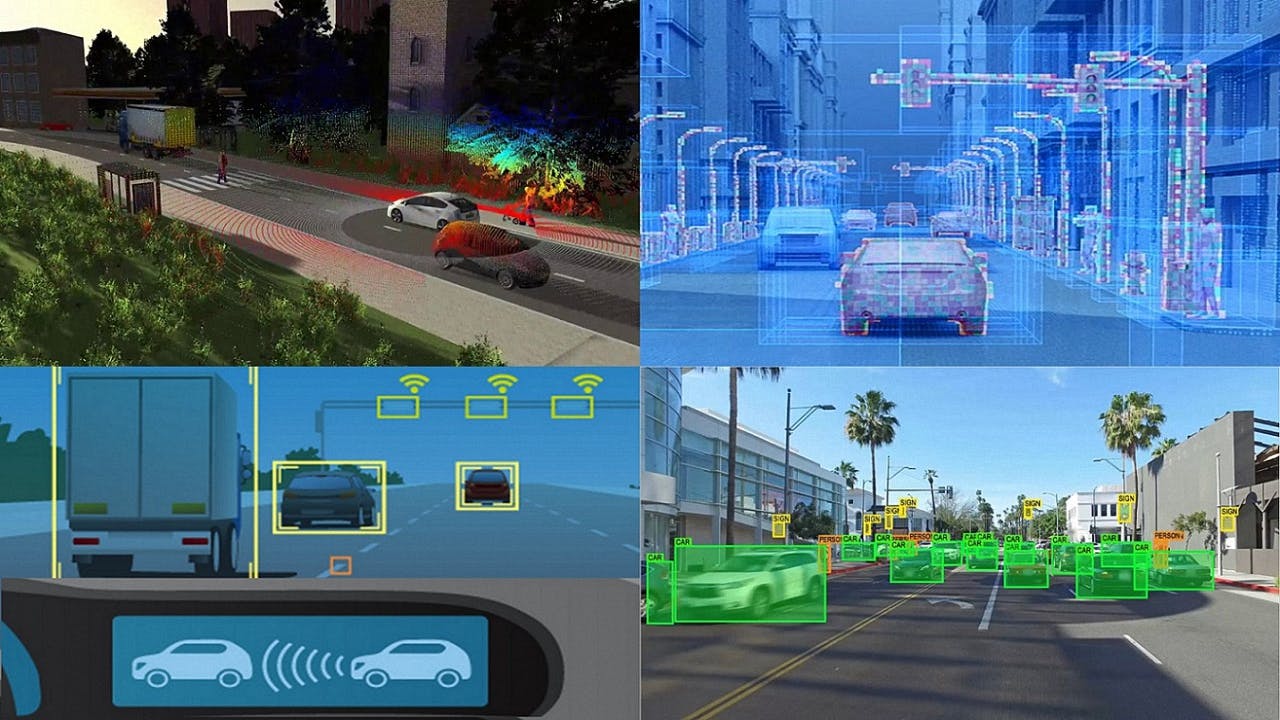
自動運転車は複数のセンサーによって運転シーンを認識しています。センサーフュージョンは、機械学習を活用し、マルチモーダル・センサーデータを統合することで、運転環境を正確に認識する手法です。認識されたシーンは、実際の運転挙動や交通パターンを適応的に学習するために使われます。
このウェビナーでは、センサーフュージョンと深層学習を使って、運転シーンの正確な認識とナビゲーションを実現する方法をエキスパートがご説明します。
次の内容を紹介します。
- マルチセンサー、複数物体の検知、トラッキング、ローカライゼーション、およびマッピングの例
- 深層学習技術 (模倣学習、強化学習) を使い、シーンの視覚化によって運転方策を学習させる例
- 仮想シナリオ生成とシミュレーションベース検証の例
スピーカー:
講演者の紹介
Siemens Digital Industries Software
François Gerard
事業開発エンジニアリングサービス、ディレクター