配送ドロイドメーカーがSimcenterソフトウェアを使用して高度な安全メカニズムを検証
シーメンスデジタルインダストリーズソフトウェアのソリューションによって、技術選定、開発、検証を合理化することで時間とコストを削減したTwinswHeel
TwinswHeel
TwinswHeelは、未来の都市型流通への貢献を目指し、宅配用ロボットを設計、製造しています。同社のロボットは、自律型で最大300kgの荷物を輸送します。動きと障害物回避を判断する人工知能が埋め込まれています。フランスのリヨンとカオールにオフィスを構えます。
http://www.twinswheel.fr/- 本社:
- Lyon, France
- 製品:
- Simcenter Products, Simcenter Amesim, Simcenter Prescan
- 業種:
- 自動車 / 輸送機器
Simcenter Amesimは複数設計領域にまたがるモデリングに最適なソフトウェアです。ロボットの複数の物理特性を統合できる強力なソリューションであり、より迅速にプロジェクトを進めることができます。
TwinswHeel
将来の都市型流通に貢献する
新たに求められる宅配市場と需要に関する調査を踏まえて2015年にフランスで産声を上げたTwinswHeelは、限界を迎える都市交通のあり方を見直し、都市部で受け入れられるロボットを設計することを決めました。まず、大規模な工場や倉庫、病院やショッピングセンターといった半開放施設を対象にサービスを開始しました。現在は、未来型都市を見据えた大規模な展開を視野に入れ、オンラインショッピングの荷物配送のほか、重い荷物を持ち運びができない人々を支援しています。TwinswHeelが目指しているのは、未来の都市型配送に役立つロボットの設計と製造です。TwinswHeelのロボットは、「フォローミー」と呼ばれる連携モードと100%自動モードの2つのモードで動作します。
自動車業界の出身で現在はTwinswHeelのCEOを務めるVincent Talon氏は、「自動車の役割を部分的にでも担うため、車輪付きであることは自明の判断でした。」と述べています。当初の試作品には2つの大きな車輪しかついていませんでしたが、競争力を高めるために4輪プラットフォームを採用しました。より自動車に近いため、拡張性の点で利点があります。
Talon氏はこう述べています。「ロボット開発には大きな3つの懸念材料がありました。それは、顧客の求める安全性と信頼性を確保した乗り物を設計できるか、購入と所有のコストを一定範囲内に抑えることができるか、社会が受け入れやすい共感の持てる外見にできるか、ということです。」
技術競争力のあるロボットの開発を目指したTwinswHeelの創業者は、12名のエンジニアからなるチームを結成し、ロボット開発に着手して以降、機構部、電気部、制御部、センサー部の統合設計を専任で行うスタッフの数を倍増させてきました。
安全性が第一
TwinswHeelは、競争の激しい成熟市場に参入後、都市環境で新たなサービスを模索していました。
排出ゼロの新サービスの好例とも言えるこのドロイドは、フランスのトゥールーズで配電事業者のEnedisを支援しています。ドロイドのおかげで同社は、送電網の修理をするためにバンに乗り込んでダウンタウンに出向く必要はなくなりました。Franprix Supermarketsは、このロボットを使って高齢者や身体の不自由な方の買い物を手助けしています。フランスのモンペリエでは現在、La Poste (フランス郵政公社) および STEF (冷蔵輸送の欧州最大手) と共同で自動ロボットを試験しています。
ただし、こうした新しいアプリケーションは安全性が最優先です。現時点では、こうしたロボット輸送に人間の監視は強制されていないものの、2020年には実験が予定されています。TwinswHeelはフランス政府とも緊密に連携しながら規制の策定に取り組んでおり、容認度を見極める目的でパイロットプロジェクトに参加しています。
TwinswHeelのロボットは現在、自動運転車と同等の安全レベルを満たすことを求められています。
Talon氏はこう述べています。「われわれは、競合他社以上に安全に注意を払っています。このロボットを自動運転車と位置付けているため、自動車と同じ基準を適用します。」
同社のエンジニアリングチームは、安全性要件をチェックする検証計画を実施しなければなりませんでした。検証計画には何百万回もの試運転が必要ですが、それは不可能です。ソフトウェアとハードウェアの複雑性、膨大な妥当性評価と検証のサイクルの必要性、多数のセンサーと豊富な組み合わせを踏まえ、メーカーは開発プロセスの再考を迫られています。シミュレーションが自動運転車の開発に革新をもたらした立役者であることは疑いの余地がありません。Simcenter™ソフトウェアのポートフォリオは、自動運転車をシステムレベル、ソフトウェアレベル、車両レベルのそれぞれで開発するため、複数領域にまたがる設計探索、検証、妥当性評価を可能にするソリューションとサービスを提供しています。
同社のエンジニアリングチームは、安全性要件をチェックする検証計画を実施しなければなりませんでした。検証計画には何百万回もの試運転が必要ですが、それは不可能です。ソフトウェアとハードウェアの複雑性、膨大な妥当性評価と検証のサイクルの必要性、多数のセンサーと豊富な組み合わせを踏まえ、メーカーは開発プロセスの再考を迫られています。シミュレーションが自動運転車の開発に革新をもたらした立役者であることは疑いの余地がありません。Simcenter™ソフトウェアのポートフォリオは、自動運転車をシステムレベル、ソフトウェアレベル、車両レベルのそれぞれで開発できるように、複数領域にまたがる設計探索、検証、妥当性評価を可能にするソリューションとサービスを提供しています。
Sense-Think-Act
自動運転車のエンジニアリングには、複雑なSense-Think-Act機能を開発し、検証する必要があります。機械コンポーネント、電気コンポーネント、ソフトウェアコンポーネントを統合したシステム・オブ・システムズです。これらのコンポーネントを別々の要素として扱っていては設計を最適化できず、ソフトウェアとハードウェアを同期的に開発して、ハードウェアコスト目標とシステム性能の両方を達成しなければなりません。
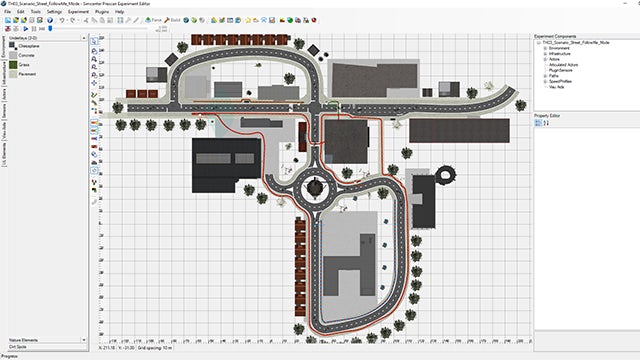
ライブ実験では、このロボットは多くの危険な状況に直面し、それを認識しました。ユーザーが同じ状況を仮想的に再現したり、専門家のアドバイスに従って仮説を立てたりできるように情報を収集します。クリティカルな状況が発生すると、すべてのセンサーでその直前の30秒または60秒のデータが保存されます。収集したデータを使用して、再利用 / 構成可能なSimcenter Prescan™ソフトウェアシミュレーションシナリオを作成します。
「Simcenter AmesimとSimcenter Prescanを使用したシミュレーション環境でこれらのシナリオを再現したものをクリティカル状況カタログとしてまとめ、検証計画や将来の開発に生かしています。状況の再現性が大きな利点であり、これにより反復作業が非常に容易になりました。」Talon氏はこう語ります。
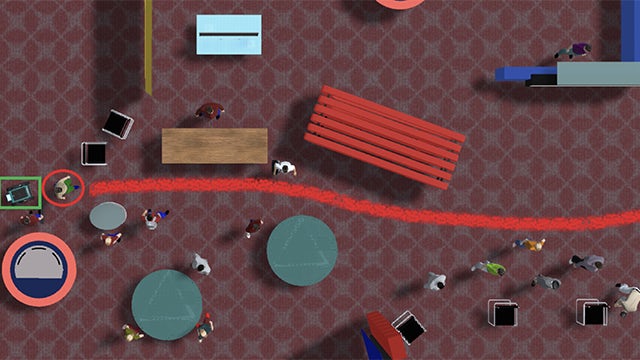
TwinswHeelのロボットには環境を踏まえて判断する人工知能 (AI) が実装されています。このAIは、畳込みとディープニューラルネットワーク(CNN/ DNN) を使用した機械学習の手法をベースにしています。安全性が最優先とされる機能においては、あらゆる状況と環境に対応できるような制御とソフトウェアの戦略を開発し、検証することが重要であり、クローズドループのシミュレーションを活用する必要があります。典型的なクリティカルな状況として、歩行者が突然、ロボットの軌道上を横切るといったシナリオが考えられます。下図は、大勢の人間と家具で埋め尽くされた展示ルームを対象の歩行者が通り過ぎようとしているところです。この歩行者のように、ロボットが複数の障害物をうまくかわせるかを試験します。緑の四角で囲まれているのがロボット、赤い円で囲まれているのが歩行者です。ロボットは障害物の位置や距離により、停止する、秒速0.5メートル以下まで減速、通常の速度で軌道を進行のいずれかを取ります。
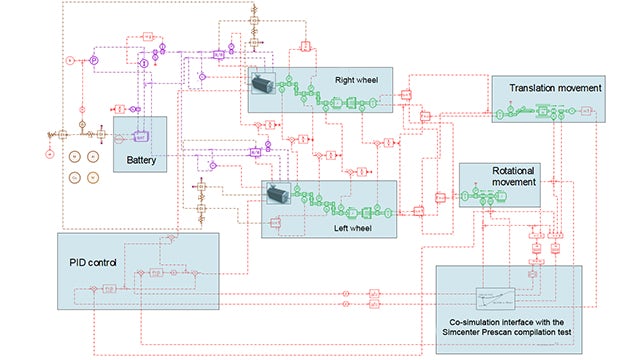
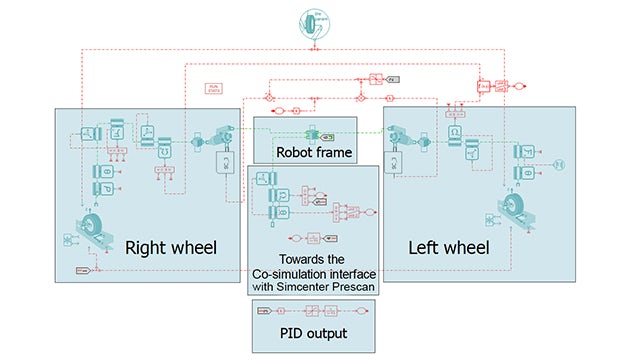
Simcenter Prescanのポイントクラウドセンサーモデルは、ライダーセンサーの処理をシミュレーションします。センサーのデータはSimulink環境に送られ、計算されて、受信部へ送出されます。ロボットレベルで判断が下され、制御部が指示を送ります。すべてをSimcenter Amesim™ソフトウェアモデルに送り、指示の内容 (例えば、2車輪の回転数など) を解釈し、物理モデルを使用してロボットのキネマティクスとメカトロニクス (ドロイドポーズ) を示します。ロボットの状態が更新され、Simcenter Prescanシミュレーション環境に読み込まれ、カメラやライダーが捕捉した情報を更新します。
複数の高難度技術の統合
Talon氏はこう述べています。「多くの物理領域を組み合わせて、信頼性、堅牢性、機能性に優れた製品をお客様に提案しなければなりません。」
このロボットには2つの電気モーター、360度回転式のライダー、位置特定とマッピングの同期化、対象物の特定と障害物回避のためのステレオカメラ、至近距離にある障害物を精細にマッピングするための超音波センサーがあります。センサーを除くすべてを社内で製造、組み立てました。
Talonは続けます。「Simcenter Amesimを使用してモデルを構築して、電気モーターのサイズなどを決定したうえで車両アーキテクチャーを選択しました。また、Simcenter Amesimを使用して、ロボットの制御部を設計および検証するためのモデルや、ドロイドの進行方向を決める人工知能を監視するためのモデルも構築しました。」
システムシミュレーションを使用すると、スタートアップ企業であっても、複数の設計案を試して、要件を満たす選択肢を選ぶことができるため、ソリューションを素早く開発できます。ほとんどのデータがそろっていない段階でも、初期モデルを開発して、最初のアーキテクチャーを定義できます。サプライヤーが決まったら、機械、電気、電子などを含むより複雑なモデルを作ります。これにより、サイジング設計と制御設計をサポートする完全なモデルが完成します。
Talon氏はこう述べます。「Simcenter Amesimは複数設計領域にまたがるモデリングに最適なソフトウェアです。ロボットの複数の物理特性を統合できる強力なソリューションであり、より迅速にプロジェクトを進めることができます。」
ロボットの最も複雑なシステムは意思決定部です。TwinswHeelは、センサーの統合にROS (Robot Operating System) を使用します。センサーのドライバーをインポートし、ソフトウェアの残りの部分とプラグイン接続しています。ROSは、C、Python、Matlabなど複数の環境で定義されたソフトウェアコンポーネントに対する通信ネットワークです。TwinswHeelは、ROSでノード (ソフトウェアコンポーネント) を作成して、ライダーポイントクラウドなどの情報をやり取りします。ロボット認知の自動変位を計算し、これらのノードを使用して、フォローミーモードの制御、位置同定、経路計画、軌道の制御を行います。

前を向いて
自動運転車用のコンポーネントは、絶えず開発が進んでおり、新しい機能と適用事例にはより高い安全性が求められます。TwinswHeelにとっての最大の課題は、自動車メーカーと同じ開発速度で製品を効率的に開発することです。「われわれは自動車メーカーから多くの刺激を受けています。メーカーの発信に絶えず関心を払い、行き止まりの道を選ぶことなく、既に最良だと自動車メーカーがみなした道筋を辿るようにしています。」とTalon氏は述べています。
米国と中国を中心に激しい競争が繰り広げられていますが、ヨーロッパは、特許による保護もあり、競合企業の数もそれほど多くはありません。こうしたことから、TwinswHeelには多くの開発可能性があります。
わずか数年の経験しかないものの、TwinswHeelは既に拡張可能なロボットの提供を計画しています。これは3つのプラットフォーム (積載量が40kgまでの小型、120~150kgの中型、最大300kgまでの大型) に対応する共通移動ベースになります。
欧州の規制当局がもし明日、無人自動運転車の走行を許可したら、どれだけの人がショッピングトロリーの代わりにロボットを使うでしょうか。
モデル・イン・ザ・ループ (MiL) 試験にSimcenter AmesimとSimcenter Prescanを使用して、開発中の最新ドロイドをシミュレーションし、上流で定義した仕様要件を満たしているかを検証したところ、実物を使った試験と比べて、時間とコストを削減できました。
TwinswHeel