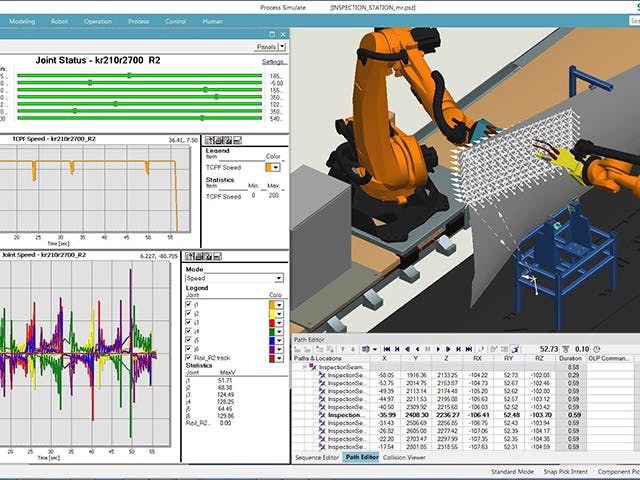
Il virtual commissioning della robotica utilizza un ambiente di simulazione dell'automazione, piuttosto che il sistema robotico fisico, per testare il comportamento del sistema in base al software di controllo effettivo. Il virtual commissioning della robotica viene eseguito prima dell'implementazione e della messa in servizio nell'area di produzione. È una delle numerose funzionalità del software di simulazione robotica.
Il virtual commissioning di robot utilizza un gemello digitale, che è una rappresentazione virtuale interattiva del sistema robotico e dell'ambiente di produzione circostante, per simulare il funzionamento pianificato e programmato del sistema robotico. Consente agli ingegneri di produzione di eseguire la programmazione robotica offline e di testarla senza interrompere le attuali operazioni di produzione.
Il virtual commissioning della robotica utilizza un ambiente di simulazione dell'automazione, piuttosto che il sistema robotico fisico, per testare il comportamento del sistema prima dell'implementazione e della messa in servizio nell'area di produzione in base al software di controllo effettivo. È una delle numerose funzionalità del software di simulazione robotica.
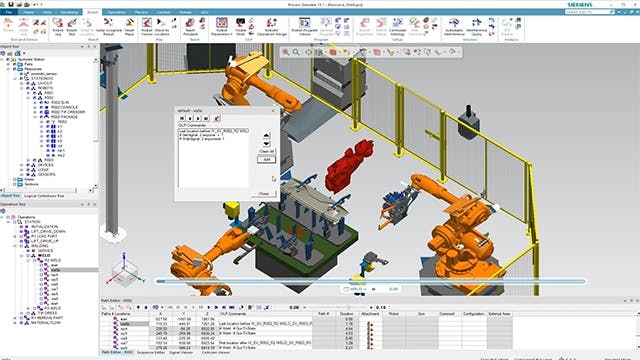
Prodotti correlati: Tecnomatix Process Simulate