La simulazione robotica è uno strumento digitale utilizzato per progettare sistemi di produzione automatizzati basati sulla robotica. Dal punto di vista funzionale, la simulazione robotica utilizza la rappresentazione digitale – un gemello digitale – per consentire l'interazione dinamica con i modelli robotici in un ambiente virtuale. I sistemi di simulazione della robotica e dell'automazione mirano a portare online i sistemi di automazione più velocemente e ad avviare la produzione con meno errori rispetto all'ingegneria dell'automazione convenzionale.
La simulazione dell'automazione svolge un ruolo cruciale nella robotica perché consente di eseguire esperimenti costosi e dispendiosi in termini di tempo su robot reali e, ancora di più, di condurre esperimenti nell'area di produzione. La simulazione robotica consente agli ingegneri di provare idee e costruire scenari di produzione in un ambiente virtuale dinamico, raccogliendo dati di risposta virtuale che rappresentano accuratamente le risposte fisiche del sistema di controllo.
La simulazione robotica si è costantemente evoluta per stare al passo con le crescenti capacità dei robot industriali. I robot vengono impiegati in ambienti dinamici in cui i compiti del robot cambiano frequentemente o coinvolgono collaboratori umani. La domanda di robotica avanzata continua a crescere man mano che i produttori aumentano la complessità, la varietà e la personalizzazione dei prodotti per soddisfare la domanda dei clienti. La robotica avanzata incorpora il processo decisionale runtime, la programmazione reattiva per eventi imprevisti e la capacità di adattarsi e migliorare in base ai dati raccolti dall'Industrial Internet of Things (IIoT) elaborati con l'intelligenza artificiale (AI). Il livello di complessità nella programmazione della robotica avanzata e nell'implementazione e nel funzionamento di robot avanzati, nonché l'elevato costo che dovrebbe essere sostenuto per eseguire il debug di un sistema robotico nell'area di produzione, rendono la simulazione robotica avanzata una componente fondamentale dell'ingegneria di produzione.
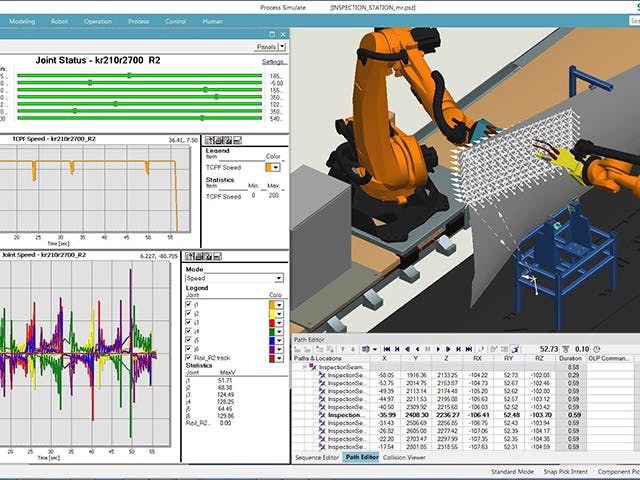
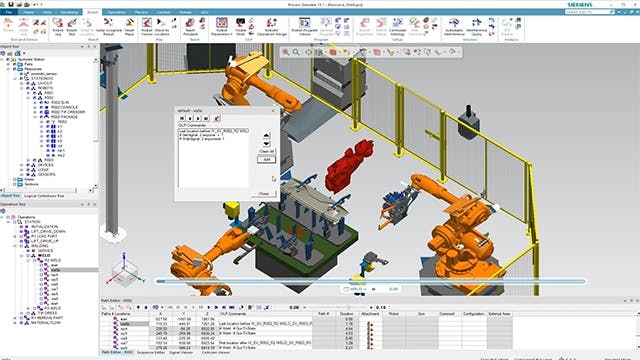
Il software avanzato di simulazione robotica consente agli utenti di progettare e ottimizzare la produzione robotica, che comprende la nuova flessibilità e personalizzazione rese possibili dalle tecnologie robotiche avanzate. Gli ingegneri possono utilizzare la simulazione robotica avanzata per progettare celle di lavoro robotizzate 3D complete, quindi validare e ottimizzare le sequenze del processo di produzione simulando comportamenti e risposte realistici. Possono validare i concept di automazione in modo digitale ed eseguire la programmazione robotica avanzata offline. Questo software di simulazione consente inoltre alle aziende di mettere in funzione virtualmente sistemi di produzione completi.
Prodotti correlati: Pianificazione e simulazione robotica | Simulazione del processo Tecnomatix