La simulation robotique est un outil numérique utilisé pour concevoir des systèmes de production automatisés basés sur la robotique. D’un point de vue fonctionnel, la simulation robotique utilise la représentation numérique – un jumeau numérique – pour permettre une interaction dynamique avec des modèles robotiques dans un environnement virtuel. Les systèmes de simulation de robotique et d’automatisation visent à mettre les systèmes d’automatisation en ligne plus rapidement et à lancer la production avec moins d’erreurs que l’ingénierie d’automatisation conventionnelle.
La simulation d’automatisation joue un rôle crucial en robotique, car elle permet d’effectuer des expérimentations coûteuses et longues sur des robots réels, et plus encore de mener des expérimentations dans l’atelier de production. La simulation robotique permet aux ingénieurs d’essayer des idées et de construire des scénarios de fabrication dans un environnement virtuel dynamique, en collectant des données de réponse virtuelle qui représentent avec précision les réponses physiques du système de contrôle.
La simulation robotique n’a cessé d’évoluer pour suivre les capacités croissantes des robots industriels. Les robots sont déployés dans des environnements dynamiques où les tâches du robot changent fréquemment ou impliquent des collaborateurs humains. La demande de robotique avancée continue de croître à mesure que les fabricants augmentent la complexité, la variété et la personnalisation des produits pour répondre à la demande des clients. La robotique avancée intègre la prise de décision au moment de l’exécution, la programmation réactive pour les événements imprévus et la capacité de s’adapter et de s’améliorer en fonction des données collectées par l’Internet industriel des objets (IIoT) traitées avec l’intelligence artificielle (IA). Le niveau de complexité de la programmation robotique avancée et du déploiement et de l’exploitation de robots avancés, ainsi que le coût élevé qui serait encouru pour déboguer un système robotique dans l’atelier de production, font de la simulation robotique avancée un élément essentiel de l’ingénierie de fabrication.
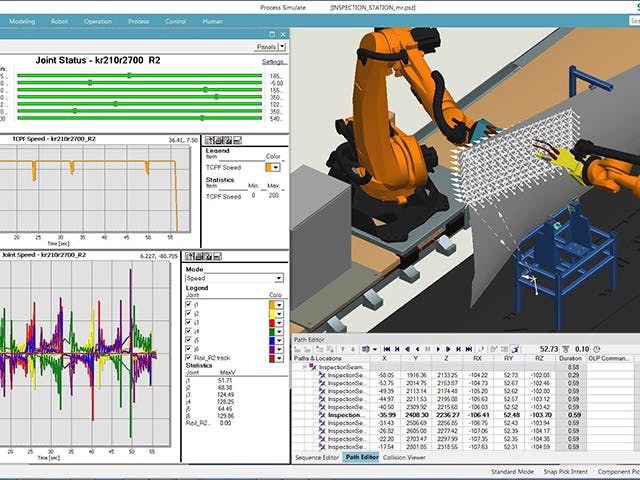
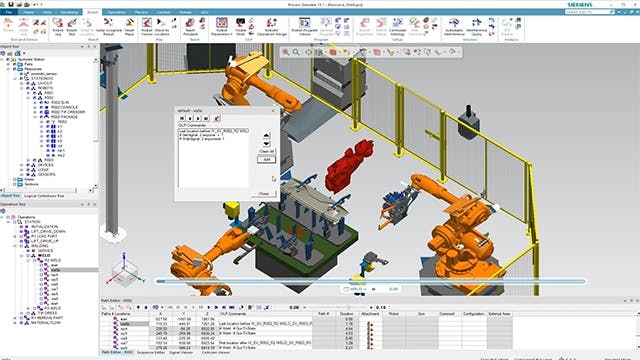
Les logiciels de simulation robotique avancés permettent aux utilisateurs de concevoir et d’optimiser la production robotique, ce qui comprend la nouvelle flexibilité et la personnalisation rendues possibles par les technologies robotiques avancées. Les ingénieurs peuvent utiliser la simulation robotique avancée pour concevoir des cellules de travail robotiques 3D complètes, puis valider et optimiser les séquences de processus de fabrication simulant un comportement et des réponses réalistes. Ils peuvent valider numériquement des concepts d’automatisation et effectuer une programmation robotique avancée hors ligne. Ce logiciel de simulation permet également aux entreprises de mettre en service virtuellement des systèmes de production complets.
Produits connexes : Planification et simulation robotique | Tecnomatix Process Simulate