Naval engineering firm uses Simcenter STAR-CCM+ to optimize propulsion system of GRC 43 patrol boat
MRA uses Siemens solution to achieve $44,000 in annual fuel savings per vessel and increase top speed by .93 knots

Maritime Research Associates
Maritime Research Associates, LLC (MRA), which was founded and is owned by Dr. Brant Savander, is a naval architecture and engineering company located Ann Arbor, Michigan. MRA works with clients in the areas of basic and applied numerical hydrodynamic research and development (R&D) that span all sectors of the marine industry.
- Headquarters:
- Ann Arbor, MI, United States
- Products:
- Simcenter Products, Simcenter STAR-CCM+
- Industry Sector:
- Marine
Simcenter STAR-CCM+ has a robust computational code that has been well validated in various marine applications.
Maritime Research Associates, LLC (MRA) is a naval architecture and engineering company located in Ann Arbor, Michigan, United States. MRA works for clients in the areas of basic and applied numerical hydrodynamic research and development (R&D) that span all sectors of the marine industry.
MRA developed an optimized propulsion system for the Global Response Cutter (GRC) 43-meter (m) patrol boat by Westport Shipyard, using Siemens Digital Industries Software’s multi-purpose Navier Stokes solver, Simcenter™ STAR-CCM+™ software, to design the propellers, struts, and rudders. The design enabled the shipyard to achieve fuel savings, increase top speed, eliminate erosive appendage cavitation and reduce noise and vibration.
The propeller and struts were built by Michigan Wheel Marine and the rudders by Westport Shipyard. The propulsion system design effort was funded jointly by MTU Detroit Diesel and Westport Shipyard.
The GRC 43m is a state-of-the-art patrol vessel, which was built to comply with the American Bureau of Shipbuilding (ABS) standards for high-speed craft. The vessel, built in response to the anticipated worldwide demand for a fast response cutter, is constructed entirely from composite materials. Innovative design and manufacturing techniques have resulted in a vessel that is on-time, on-budget and as promised. Computational fluid dynamics (CFD) played a major role in the vessel’s design. CFD was used to design an optimized strut-rudder-propeller system that efficiently interacts with the GRC hull form.
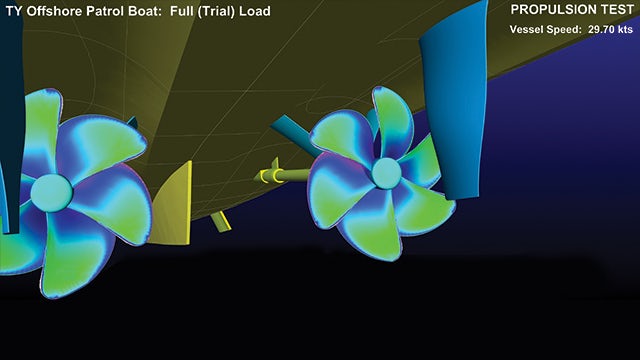
Figure 2: Comparison between selected experimental and numerical results for TY Offshore applications 1 and 2.
Marine propulsion system design
The main components of a propulsion system are the power plant, transmission, and propulsor. With an ever-increasing demand for both larger and faster vessels, optimized propeller design is integral to maximizing performance that increases efficiency. This increase in efficiency for given vessel speeds leads to lower fuel costs by minimizing power consumption. Conversely, for a given power, increased efficiency maximizes vessel speed. In addition, the demands of noise and emission control regulations require better selection and interaction of the propellers with the ship as a system.
Propellers are designed for efficiency, noise and vibration control, avoiding erosive cavitation and achieving minimal environmental impact. By taking a comprehensive approach to all these areas, there is a reduced risk of poor performance. However, in today’s climate of global energy challenges, fuel savings are often the predominant consideration for ship operators.
Driven by commercial pressures, modern propulsion systems design has relied less on traditional model tests and moved to a combination of computational design-by-analysis methods and systematic validation tests at both model- and full-scale. With the technological advances in computer-aided engineering (CAE) in the marine industry, more propulsion systems are being designed solely by analysis prior to experimental testing of the final model.
This can potentially result in enormous time and cost savings by either reducing or eliminating expensive physical tests. The role of physical model tests is evolving into more of a validation mechanism. In addition, CAE offers a fast, economical method to analyze propeller configurations and their interactions with the entire vessel at full scale, hence avoiding the effects of model scaling.
The aim of any vessel design is to produce a hull form with minimal resistance subject to seakeeping constraints, a propulsion system that operates efficiently in the wake of the vessel and a rudder that maneuvers the ship safely. However, these three components cannot be viewed in isolation, as each component also influences the performance of the others in various ways. Reynolds Average Navier Stokes (RANS) solvers can be used for open water propeller analysis, appended resistance tests and self-propulsion analysis, which includes the effects of cavitation.
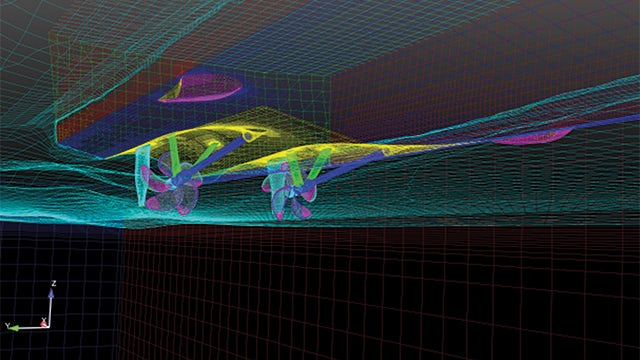
Figure 3: Computational mesh on the free surface and the vessel.
Westport GRC propeller: design by analysis
The Westport Global Response Cutter is a vessel for littoral and offshore security and patrol. The vessel has a maximum speed of 32.8 knots and a range of 1,000 nautical miles (nm) at top speed. The vessel uses two MTU 16V400 engines coupled with five-blade propellers, all proven for fast vessels with high-load factors and maximum mission availability.
The propellers, struts, and rudders were all designed with a wake-adapted approach by MRA using Simcenter STAR-CCM+. The design enabled GRC 43 owners to reduce predicted annual fuel consumption by 11,000 gallons, thereby achieving $44,000 per year in fuel savings per vessel, increasing top speed by 0.93 knots, reducing radiated pressure pulse amplitudes by 40 percent, eliminating strut and rudder cavitation and reducing noise and vibration.
To gain full confidence in computational analysis, it is paramount to validate the numerical methodology with experimental results. Simcenter STAR-CCM+ has a robust computational code that has been well validated in various marine applications. MRA also has built an in-house computational methodology using Simcenter STAR-CCM+ after validating the performance of the code against experimental results for various problems.
An example of validation is shown in figure 2. Here, the ability of Simcenter STAR-CCM+ to accurately predict the performance of the strut-propeller-rudder system was validated against a comprehensive model test program in the depressurized towing tank at the Maritime Research Institute of the Netherlands (MARIN). This enabled MRA to gain confidence in and validate the computational solution strategy. The MARIN program was funded by TY Offshore and MTU Detroit Diesel. The image shows a sample comparison between selected experimental and numerical results for the TY Offshore application.
Due to the confidence gained from validation studies, the design of the strut, propeller and rudder system was largely performed using Simcenter STAR-CCM+. The final stages of the design process consisted of 10 propeller designs and five design iterations for the struts and rudders. They were all simulated in Simcenter STAR-CCM+. These combinations were analyzed in the “behind” or self-propulsion configuration.
This computational model consisted of the ship hull, appendages, propellers, rudders and struts. A computational domain was built around the model to represent the fluid domains of both liquid and air, with a free surface at the junction of the two fluids. The volume of fluid (VOF) method in Simcenter STAR-CCM+ was used due to the presence of two immiscible fluids. The method solves for the volume fraction of each fluid in each cell. The free surface is the location where the volume fraction is between 0 and 1 for capturing the interface between the two fluids. The free surface waves are specified in Simcenter STAR-CCM+ using the VOF waves capability.
The computational domain was discretized into cells of polyhedral and hexahedral shape and the Navier Stokes equations were solved within each cell for both fluids. The mesh near the free surface was refined sufficiently to resolve the wave height and wavelength. The self-propulsion analysis required a stationary outer domain of trimmed hexahedral cells and an inner rotating domain of polyhedral cells.
The inner polyhedral domain defined the propeller geometry, allowing the propeller rotation, and had about 1.5 million (M) computational cells. The outer hexahedral domain defined the ship hull, appendages and the surrounding fluids with 1.5 to 2M cell volumes. A boundary layer mesh consisting of prismatic cells was used to capture the boundary layer of the flow near the solid surfaces.
The propulsion tests were conducted by iterating different combinations of the designs until all performance requirements were met. The tests were conducted at the maximum speed of 32.5 knots. The wave amplitude around the vessel at a design point for the final geometry is shown in figure 4. Figure 5 shows the initial and final optimized geometry of the propeller, rudder, and struts. The cavitation on the components has been greatly reduced from the initial design on all components. Also seen is the final optimized V-strut geometry, adapted to the wake profile from the hull. Figure 7 shows the comparison of the initial and final designs of the rudder. The optimized design has reduced cavitation and is designed for minimal influence from the propeller wake on cavitation.
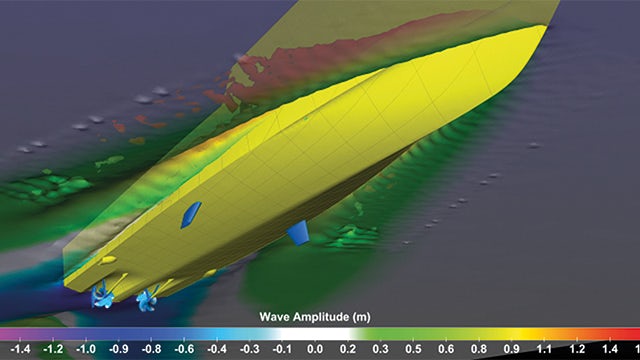
Figure 4: Wave amplitude for the final geometry.
Final Design
The final optimized design was found to offer excellent fuel savings with an estimated reduction of 11,000 gallons of fuel with a cost savings of $44,000 per year per vessel when compared with typical commercial off-the-shelf (COTS) technology. There was also an increase of 0.93 knots at top speed, which would have required an additional 180 kilowatts (kW) per engine if a standard COTS approach had been taken.
One of the main parameters used to characterize a ship performance is the quasi-propulsive coefficient (QPC), which is the ratio of the effective power to the delivered power of the engines. Performance comparisons were made with COTS propulsion hardware options at three speeds: loiter at 12 knots, transit at 22 knots and flank at 32.5 knots. The fuel cost savings per year from the new design was approximately $11,000 per 1 percent QPC, leading to a total of $44,000 fuel savings from 4 percent QPC savings. The QPC savings also led to a speed gain of 0.22 knots for loiter, 0.72 knots for transit and 0.93 knots for flank speed. The optimized design further eliminated cavitation on the strut and the rudder with wake alignment. Additional improvements included a decrease of 40 percent in radiated pressure pulse amplitudes, leading to quieter vessels.
A fully optimized strut-propeller-rudder system was designed solely based on computational methods with excellent returns on cost, performance, and efficiency. The final vessel is a high-quality, cost-effective platform for demanding patrol boat service.
In recent years, there has been a growing emphasis on using computational domains that mirror the towing tanks and cavitation tunnels of traditional experimental facilities for numerical development of the hull form and propulsor systems.
As processor costs continue to decrease coupled with stable, validated and verified tools such as Simcenter STAR-CCM+, the trend toward greater emphasis on numerical development of marine systems will continue to expand.
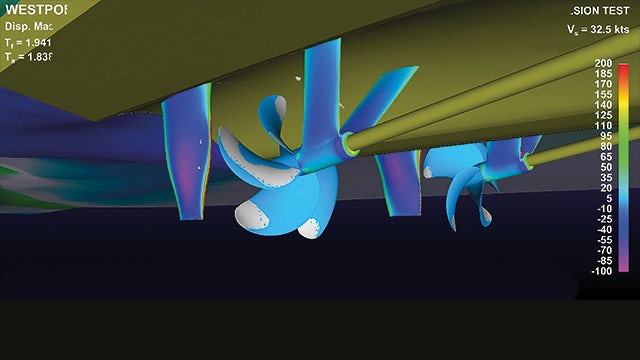
Figure 5: Comparison of original and final designs, showing cavitation on the components.
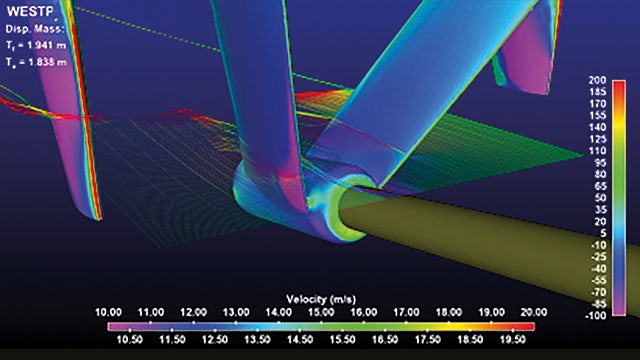
Figure 6: Comparison of the initial and final design of the wake-adapted V-strut.
A fully optimized strut-propeller-rudder system was designed solely based on computational methods with excellent returns on cost, performance and efficiency.
MRA developed an optimized propulsion system for the Global Response Cutter 43-meter patrol boat by Westport Shipyard, using Siemens Digital Industries Software’s multi-purpose Navier Stokes solver, Simcenter™ STAR-CCM+™ software, to design the propellers, struts and rudders.
The final optimized design was found to offer excellent fuel savings with an estimated reduction of 11,000 gallons of fuel with a cost savings of $44,000 per year per vessel when compared with typical commercial off-theshelf (COTS) technology.