Heading back to Mars with a thermal control system developed using NX and Simcenter
Seamless, multi-discipline integration between design, analysis and manufacturing enabled JPL to meet the thermal challenges posed by the Mars Science Laboratory
JPL
The Jet Propulsion Laboratory (JPL) is a federally funded research and development center managed by the California Institute of Technology for the National Aeronautics and Space Administration.
http://www.jpl.nasa.gov- Headquarters:
- California Institute of Technology, Pasadena, United States
- Products:
- NX, NX CAD, Simcenter 3D Software, Simcenter Products, Teamcenter
- Industry Sector:
- Aerospace & defense
A bigger, better rover
The Jet Propulsion Laboratory (JPL) is the lead United States center for robotic exploration of the solar system. Its history of space exploration and discovery spans more than 50 years, from the early Explorer 1 spacecraft to the latest Mars mission, which launched in November 2011 and is due to set down on Mars in August 2012.
Called the Mars Science Laboratory (MSL), this latest mission will put a mobile laboratory, the Curiosity rover, onto the Mars surface inside Gale Crater. Designed to determine whether the area ever had conditions favorable for life, Curiosity is equipped with a robotic arm that can drill into rocks, scoop up soil and deliver samples to internal analytical instruments.
New thermal design and analysis challenges
Curiosity isn’t the first rover JPL has sent to Mars. It sent the first, Sojourner, in 1997. Two others, Spirit and Opportunity, explore regions on opposite sides of that planet. They have been doing so since January 2004. Originally designed to operate for three months, they have been successful beyond expectations, with Opportunity still active today. While the experience with those rovers undoubtedly played a role in the development of the MSL’s thermal control system, there were major differences in this project that posed many new challenges for JPL.
Curiosity’s power generator, the Multi-Mission Radioisotope Thermoelectric Generator (MMRTG), is constantly generating a substantial amount of heat, so JPL had to add more capability to the heat rejection system to accommodate it during the cruise phase . Also, this rover’s payload is larger with much higher heat dissipations. This larger heat load on the rover influenced the need to add a rover heat rejection system. But an even bigger difference is that Curiosity’s heat rejection system has to operate on the surface of Mars. While the cruise heat rejection system operates in a single mode to remove waste heat, the rover heat rejection system must perform both heating and cooling on the Martian surface.
The design of the MSL’s thermal control system involved more than just the heat rejection system. It included all the typical thermal control hardware (heaters, thermostats, thermal control coatings and thermal blankets) that maintain the payload and the spacecraft subsystems within their allowable temperature requirements, for all operating modes and in the wide range of thermal conditions the MSL will experience throughout the mission lifetime.
The highest temperature that portions of the MSL flight system will experience is estimated to be 1,447 degrees Celsius (C) during entry into the Mars atmosphere. The coldest environment it will experience is the coldness of deep space (2 Kelvin/-271 degrees C) during the cruise phase to Mars. The thermal environment on the Mars surface will range from -135 degrees C to +50 degrees C.
Wanted: seamless integration
Nearly a decade ago, JPL started to put together a technology infrastructure aimed at meeting the more aggressive schedules and leaner budgets it had started to experience. A key element was establishing seamless software interfaces from conceptual design through manufacturing. This would allow JPL to minimize transcription errors, manual processes and interpolations between meshes. Minimizing errors and rework was critical to maintaining design and fabrication schedules.
To address such issues, JPL implemented NX™ and Simcenter™ 3D software from Siemens Digital Industries Software as an end-to-end mechanical design platform. With NX and Simcenter 3D, JPL got a fully integrated computer-aided design (CAD)/computer-aided engineering (CAE)/computer-aided manufacturing (CAM) system. This is the system JPL used to develop the mechanical portions of the MSL, including the thermal control system.
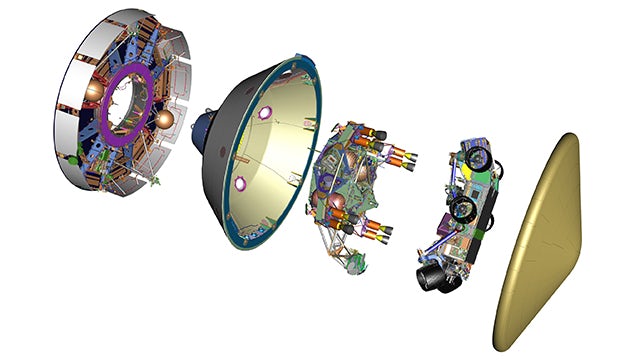
Virtual MSL
JPL’s mechanical designers modeled the entire MSL using NX. There are digital assembly models of the rover, the cruise stage and the descent stage. Analysts used the NX geometry, simplifying it as necessary, as the basis for their finite element meshes. Having design geometry and the analysis meshes in a single environment improved collaboration between the design and analysis teams and also reduced the time and effort spent creating analysis models. The integrated NX and Simcenter 3D environment also allowed the engineering teams to rapidly re-evaluate designs as the mechanical hardware evolved.
JPL engineers started with small simulations (as this was the pilot program) to validate modeling assumptions, and eventually gained confidence that their models correctly replicated the physics involved. Then they used the Simcenter 3D solutions for thermal analysis to simulate a variety of physical effects, such as fluid flow in the Mars rover, heater control of the propulsion system, and solar loading of the cruise stage. Analysis results were used to update the design geometry. The ease and efficiency of going from the design to thermal analysis and then back to update the design geometry accelerated the development of the MSL’s thermal control system considerably. Saving time and keeping to the schedule was critical, although an equally important benefit of using Simcenter 3D was the ability to evaluate the thermal control system’s performance under conditions that JPL could not simulate with physical testing.
In addition to tighter design-analysis integration, use of Simcenter 3D enabled integration between different types of analysis, such as thermal and mechanical distortion and stress analysis. Prior to adopting Simcenter 3D, engineers would have run a thermal solution and then manually mapped temperatures to the structural mesh. Use of Simcenter 3D eliminated this manual process.
Use of Simcenter 3D also enabled easier access to multiple types of analyses. For example, designers also needed to know whether any moving components would interfere with any other components or rover operations. This would have been very difficult to determine by looking at static drawings or digital models. Using Simcenter 3D Motion made it possible to answer questions such as these without the costs and delays of physical testing.
We must now wait until the MSL reaches Mars, sets down the rover, and it gets to work before we see the final results of these efforts. It is known already, however, that this project delivered many of the benefits the agency was hoping for when it went looking for a seamless end-to-end solution for mechanical design. The MSL flight system is the most complex Mars mission that JPL has implemented involving new technologies and a new approach for entry, descent, and landing.
As such, the development lifecycle is very difficult to compare to previous missions but it is clear that the MSL program had less manual work and more efficient upstream and downstream modeling and simulation interfacing compared to previous programs. And not having to re-enter data into multiple applications ruled out a potential source of error, giving JPL a higher level of confidence in the MSL design than it would have had otherwise.