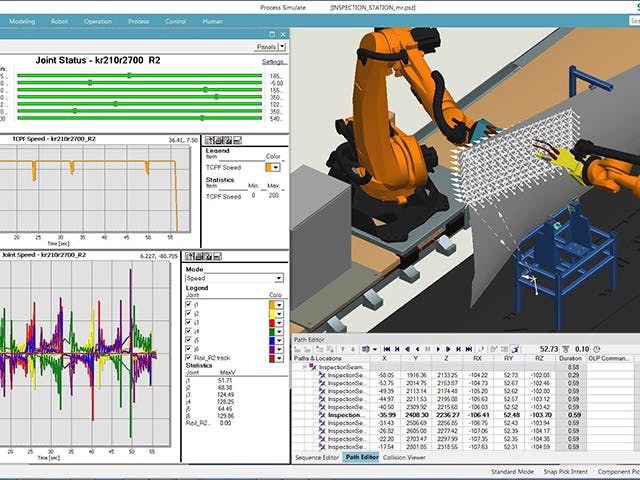
La puesta en marcha virtual robótica utiliza un entorno de simulación de automatización, en lugar del sistema robótico físico, para probar el comportamiento del sistema en función del software de control real. La puesta en marcha virtual robótica se realiza antes de la implementación y puesta en marcha en la planta de producción. Es una de las varias capacidades funcionales del software de simulación robótica.
La puesta en marcha virtual robótica emplea un gemelo digital, que es una representación virtual interactiva del sistema robótico y el entorno de producción circundante, para simular el funcionamiento planificado y programado del sistema robótico. Permite a los ingenieros de fabricación realizar programación robótica fuera de línea y probarla sin interrumpir las operaciones de producción actuales.
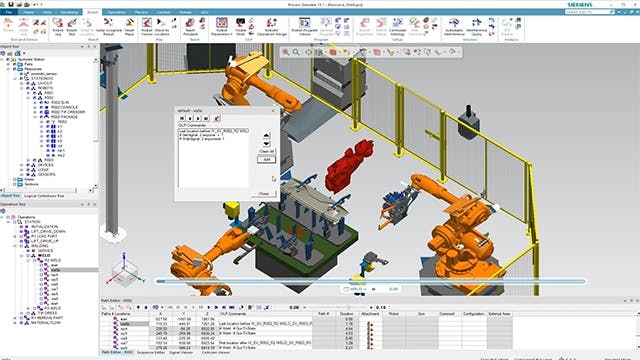
La puesta en marcha virtual robótica utiliza un entorno de simulación de automatización, en lugar del sistema de robótica física, para probar el comportamiento del sistema antes de la implementación y puesta en marcha en la planta de producción en función del software de control real. Es una de las varias capacidades funcionales del software de simulación robótica.
Productos relacionados: Simulación de procesos de Tecnomatix