La simulación robótica es una herramienta digital que se utiliza para diseñar sistemas de producción automatizados basados en la robótica. Desde el punto de vista funcional, la simulación robótica utiliza la representación digital (un gemelo digital ) para permitir la interacción dinámica con los modelos robóticos en un entorno virtual. Los sistemas de simulación de robótica y automatización tienen como objetivo poner en línea los sistemas de automatización más rápido y lanzar la producción con menos errores que la ingeniería de automatización convencional.
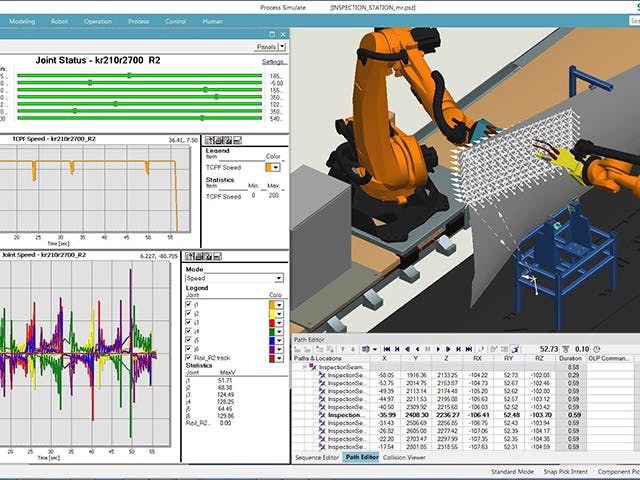
La simulación de automatización desempeña un papel crucial en la robótica, ya que permite realizar experimentos costosos y lentos en robots reales, y aún más para llevar a cabo experimentos en la planta de producción. La simulación robótica permite a los ingenieros probar ideas y construir escenarios de fabricación en un entorno virtual dinámico, recopilando datos de respuesta virtual que representan con precisión las respuestas físicas del sistema de control.
La simulación robótica ha evolucionado constantemente para mantenerse al día con las crecientes capacidades de los robots industriales. Los robots se están desplegando en entornos dinámicos donde las tareas del robot cambian con frecuencia o involucran a colaboradores humanos. La demanda de robótica avanzada continúa creciendo a medida que los fabricantes aumentan la complejidad, la variedad y la personalización del producto para satisfacer la demanda de los clientes. La robótica avanzada incorpora la toma de decisiones en tiempo de ejecución, la programación reactiva para eventos imprevistos y la capacidad de adaptarse y mejorar en función de los datos recopilados por el internet industrial de las cosas (IIoT) procesados con inteligencia artificial (IA). El nivel de complejidad en la programación de robótica avanzada y la implementación y operación de robots avanzados, así como el alto costo en el que se incurriría para depurar un sistema robótico en la planta de producción, hacen que la simulación robótica avanzada sea un componente crítico de la ingeniería de fabricación.
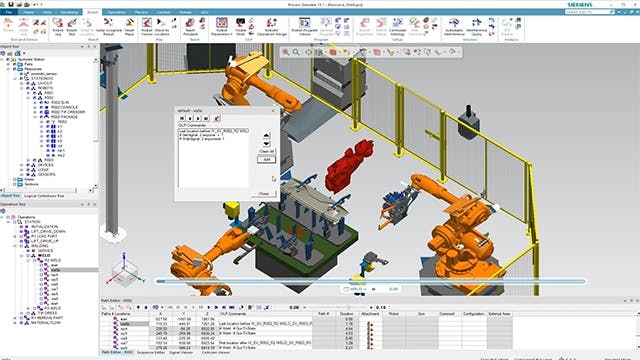
El software de simulación robótica avanzada permite a los usuarios diseñar y optimizar la producción robótica, que comprende la nueva flexibilidad y personalización que son posibles gracias a las tecnologías robóticas avanzadas. Los ingenieros pueden emplear la simulación robótica avanzada para diseñar células de trabajo robóticas 3D completas, y luego validar y optimizar las secuencias del proceso de fabricación simulando un comportamiento y respuestas realistas. Pueden validar conceptos de automatización digitalmente y realizar programación robótica avanzada fuera de línea. Este software de simulación también permite a las empresas poner en marcha sistemas de producción completos de forma virtual.
Productos relacionados: Planificación y simulación robótica | Simulación de procesos de Tecnomatix