Reducing time and cost of testing by using a virtual platform
HES-SO uses Simcenter Amesim to rapidly select ankle exoskeleton design
HES-SO University of Applied Sciences and Arts
The HES-SO University of Applied Sciences and Arts Western Switzerland focuses on effective and practical training for its 21,000 students. With a mission of constantly improving teaching practices and services, it has become a distinguished facility for higher education among the seven cantons of Western Switzerland.
https://www.hes-so.ch/en/homepage- Headquarters:
- Fribourg, Switzerland
- Products:
- Simcenter Products, Simcenter Amesim
- Industry Sector:
- Medical devices & pharmaceuticals
Simcenter Amesim helps us by serving as a virtual test platform where design space can be narrowed down in a systematic and efficient way. In a less expected way, it also helps in providing a technology-neutral platform that can be leveraged by users to dive into domains they are unfamiliar with.
HES-SO University of Applied Sciences and Arts
Medical powered exoskeletons can improve the quality of life of individuals who have lost use of their legs by enabling system-assisted walking. Recent clinical studies in rehabilitation therapy show more biomedical benefits from exoskeletons compared to classical passive orthoses. However, participants of the studies indicate that mass and size are concerns during their gait cycle when used daily. Therefore, these systems must be improved.
Founded in 1998, the HES-SO University of Applied Sciences and Arts Western Switzerland is composed of six faculties and network of schools of higher education. HES-SO plays a preeminent role in the socio-economic and cultural development of the seven cantons of Western Switzerland. In parallel with practice-oriented, tertiary education, the university carries out applied research and development (R&D) projects and is a hub of ingenuity, innovation and creativity.
Emmanuel Viennet, mechanical engineering professor, at the HES-SO School of Engineering and Architecture of Fribourg, is affiliated with the Sustainable Engineering Systems Institute (SeSi). His teaching and research activities focus on fluid power technology and system simulation. He conducts projects in various industry branches, such as off-road machinery, aerospace, transportation and assistive technologies.
The focus of HES-SO’s syllabus is on using science (methodology and knowledge) to build technology (goods or services). With the majority of students coming from vocational schools, practice sessions are essential to acquire skills. Viennet explains:
“System simulation is a great help because it enables virtual practice with systems that are too expensive to have or too complex to grasp in the time available. For instance, in the hydraulics class, I use Simcenter Amesim for training activities where students must virtually troubleshoot hydraulic systems in which malfunctions have been intentionally included.”
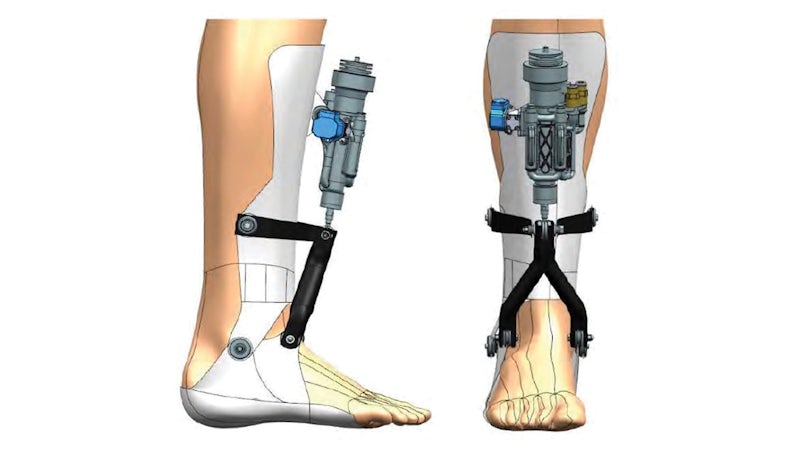
Currently, he is working on a project named Talaris, which focusses on the development of a hydraulic actuator for an ankle exoskeleton. This project is named after the winged sandals of the Greek messenger god Hermes and is intended for patients in rehabilitation therapy following a stroke.
A stroke often results in brain damage due to a sudden reduction of blood flow to brain cells. After three months, 20 percent of people remain wheelchair bound and approximately 70 percent walk at a reduced velocity. The rehabilitation requires repetitive walking practice to maximize neural recovery. However, not all individuals are able to practice walking without the assistance of a therapist after suffering a stroke. Robotic exoskeletons are a new generation of robotic-assisted gait training devices that assist lower limb movement to allow repetitive walking practice. During rehabilitation, these exoskeletons can greatly improve functional recovery and psychological well-being after a stroke. The objective of the Talaris project is to demonstrate that hydraulic actuators, with high power-to-weight and force-to-weight ratios, are an interesting alternative to electric motors in the vast majority of current exoskeleton projects.
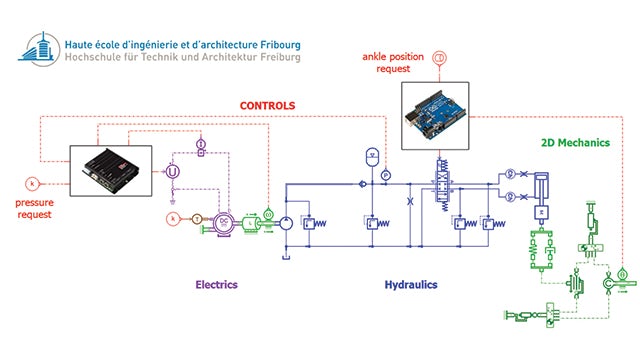
Figure 2. Simcenter Amesim model of ankle exoskeleton.
Fluid power technology for powered ankle exoskeleton
The critical challenge while working on innovative R&D projects at an academic institution, is dealing with a large design space with bounded and non-renegotiable financial resources. Efficiency in synthetizing, analyzing and evaluating large numbers of potential solutions to find the right one is essential to meet the project’s goals.
One goal of the Talaris project was to build a demonstrator of the developed concept. With a limited budget for hardware material, testing several solutions was not an option.
By combining different hydraulic architectures (pressure supply and flow supply), distribution principles (pump or valve control), actuator types (differential cylinders and double-rod cylinders) and energy storage components (springs and hydraulic accumulators), they generated a dozen a priori meaningful variants.
To overcome budget challenges, Viennet and his team used Simcenter™ Amesim™ software, which is a part of the Siemens Xcelerator business platform of software, hardware and services, for system simulation and virtual testing to evaluate the different solutions. Therefore, his team could select two solutions to refine and compare, allowing them to quickly decide on their final design.
“Thanks to Simcenter Amesim, we could narrow down our initial design ideas and thoroughly investigate our two final design candidates. Simcenter helped us achieve our goal by providing a virtual test platform to confidently select and test the most suitable design,” Says Viennet.
By combining results of both numerical simulations and preliminary tests, they oriented themselves toward a servo-hydraulic actuation rather than an electro-hydrostatic actuation because of its higher dynamic performance.
In this project, the simulations were mainly performed to characterize the dynamic performance of the actuation system. The ankle exoskeleton should provide full assistance to an 80 kilogram (kg) individual walking at normal speed, requiring the whole system to have a bandwidth of at least 8 hertz (Hz).
“Without simulation, we would have used more classical tools like Excel, which would have limited ourselves to steady state analysis. On the other hand, we would have built more prototypes to reach the same level of system understanding,” Viennet says.
“Simcenter Amesim helps us by serving as a virtual test platform where design space can be narrowed down in a systematic and efficient way. In a less expected way, it also helps in providing a technology-neutral platform that can be leveraged by users to dive into domains they are unfamiliar with,” Says Viennet.
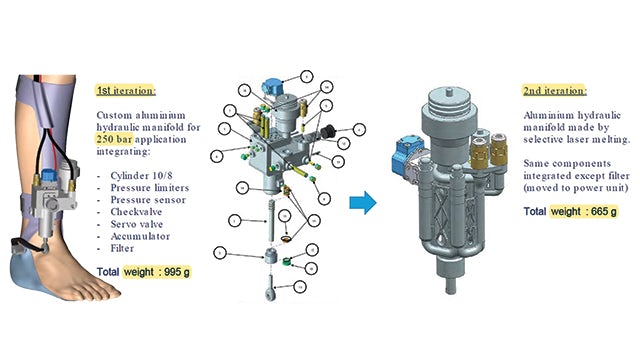
Figure 3. First concept for the integration of the actuator on an exoskeleton structure and design iterations.
Technologies that matter for human beings
The challenge for Viennet is expanding the use of his team’s modeling expertise throughout a variety of contexts. It requires flexibility and reliability on open, industrial software platforms that can be linked/embedded/converted to run with third-party software. In today’s industry, models are everywhere and creating them is no longer just a hobby for scientists.
Models aid in defining, validating and operating complex systems (the comprehensive digital twin, diagnosis tool, etc.). The real challenge for the future is developing sustainable technologies that serve human beings and can be fairly shared.
Designed as human-scaled equipment for rehabilitation therapy, the ankle exoskeleton is an example of a project moving in this direction. Another project Viennet and his team are working on is improving e-bike safety using antilock brake systems (ABS). This promotes the use of low-tech, energy efficient bicycles for short-distance commuters.
Thanks to Simcenter Amesim, we could narrow down our initial design ideas and thoroughly investigate our two final design candidates.
HES-SO University of Applied Sciences and Arts