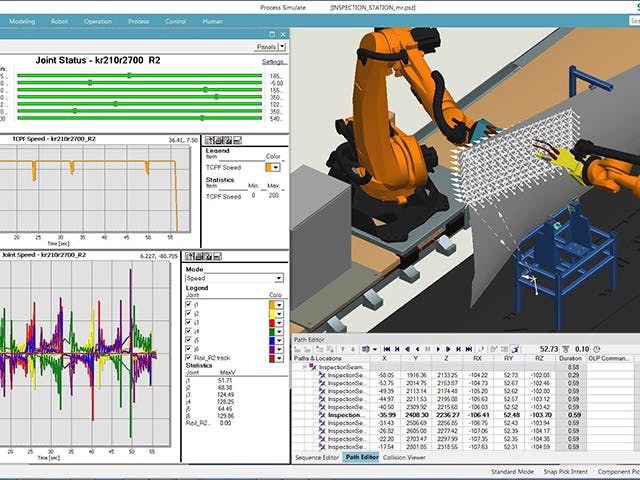
Bei der virtuellen Inbetriebnahme der Robotik wird anstelle des physischen Robotiksystems eine Automatisierungssimulationsumgebung verwendet, um das Verhalten des Systems auf der Grundlage der tatsächlichen Steuerungssoftware zu testen. Die virtuelle Inbetriebnahme der Robotik erfolgt vor der Bereitstellung und Inbetriebnahme in der Produktion. Es ist eine von mehreren funktionalen Fähigkeiten von Robotik-Simulationssoftware.
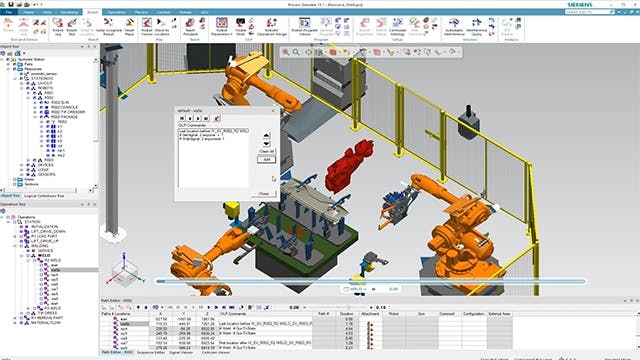
Bei der virtuellen Inbetriebnahme der Robotik wird ein digitaler Zwilling verwendet, bei dem es sich um eine interaktive virtuelle Darstellung des Robotiksystems und der umgebenden Produktionsumgebung handelt, um den geplanten und programmierten Betrieb des Robotiksystems zu simulieren. Es ermöglicht Fertigungsingenieuren, Offline-Robotik-Programmierungen durchzuführen und zu testen, ohne den laufenden Produktionsbetrieb zu unterbrechen.
Bei der virtuellen Inbetriebnahme von Robotern wird anstelle des physischen Robotiksystems eine Automatisierungssimulationsumgebung verwendet, um das Verhalten des Systems vor dem Einsatz in der Produktion und der Inbetriebnahme auf der Grundlage der tatsächlichen Steuerungssoftware zu testen. Es ist eine von mehreren funktionalen Fähigkeiten von Robotik-Simulationssoftware.
Verwandte Produkte: Tecnomatix Prozess simulieren