Simulation of next-generation driving dynamics using Simcenter 3D for motion simulation
Real-time multi-body simulation and its relationship to “the best cars in the world”

Daimler-Benz AG
Mercedes Benz designs, manufactures and delivers vehicles for the premium car market.
http://www.mercedes-benz.com- Headquarters:
- Sindelfingen, Germany
- Products:
- Motion, Simcenter 3D Software, Simcenter Products
- Industry Sector:
- Automotive & transportation
Our whole development process is focused on achieving that one goal: the best cars in the world.
Mercedes Technology Center
In 2001, Daimler pioneered a roll-out of a digital car prototyping process called DPT. Today, model-based development and digital fine-tuning creates room to develop an ever-increasing multitude of car variants based on the same platform. Conditions are created for each car variant ending up with its own ride and handling characteristics.
The development for Mercedes-Benz passenger cars and their platforms, engines, transmissions and axles takes place at the technology centers at Sindelfingen and Untertürkheim, both situated near Stuttgart. “Our target is the pole position in the premium car market,” says Prof. Dr. Ludger Dragon, senior manager of the Ride Comfort Division at the Mercedes Technology Center at Sindelfingen. “The creation and deployment of the best and most highly functioning development process must enable us to bring the best cars to that market. Our whole development process is focused on achieving that one goal: the best cars in the world.”
Best technology, best processes
Engineering cutting-edge technology is only possible through the best possible processes. This means all process specifications are precisely defined. “To make sure the final product meets the most exacting standard, we work in close collaboration with our design, development, testing and production colleagues throughout the whole process: from the initial idea to the production standard,” Dragon says.
Digitalization and virtual modeling of prototypes are becoming more and more important in the vehicle development process. With the 2001 introduction of a standard digital process, while developing the current Mercedes-Benz C-class, Daimler set the trend in the car industry. The company has come to depend on the use of digital prototyping (DPT) ever since.
Over the past decade, engineers at the development center of Daimler in Sindelfingen have further enhanced simulation methods and processes. “It has been a progressive process,” says Theodor Grossmann, team manager of Ride Simulation at Mercedes Technology Center.
He explains, “You start building by fixing a chassis and develop derivative car variants on this same platform, using digital frontloading to tune its hardware components and the software-controlled subsystems. The early development stages of these variants are now relying more and more on the results of the digital process.” Modelbased development is one of the keys for the realization of platform concepts. “Today, cars come in multiple model variations to fulfill as many customers’ needs as possible,” Dragon says. “The number of platforms that we develop will not change dramatically, but the amount of derivatives has increased; our A- and B-class for example. Before there were two, now we build five variants. The same is true for the C- and E-class. Some of these variants and their driving behaviors are mainly developed by means of simulation.”
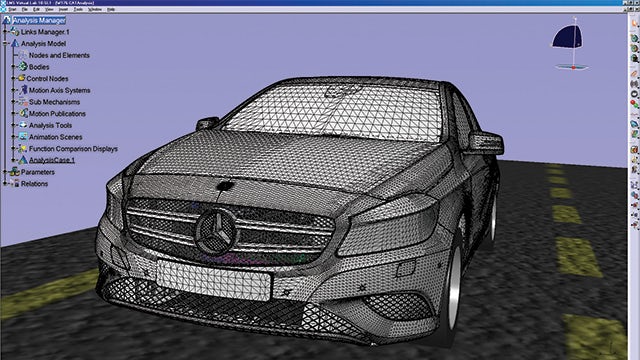
Simulating ride comfort while driving on different road surfaces with Simcenter 3D for motion simulation software.
Digital development process and data pool
Digital development must comply with the same timing layout. Throughout the entire development process, different quality gates and data delivery deadlines are set. Horst Brauner, who is the team manager for Control Systems Analysis at Mercedes Technology Center, explains, “Deadlines in the digital development world are set by different quality gates in the DPT process. This way results are fed back into the development process and are accessible to all engineers and subcontractors on time.
In the hardware world, the deadline is set by calculating back from the date the first experimental prototype is expected to be assembled.
But building a simulation model up to that task involves a wide range of geometric and functional data, modeling these components in every behavioral detail. At Daimler, all available geometric and functional data on the developed car have to be collected – from the concept layout through to the shock absorber characteristics – in a single data pool. This data pool is accessible to all experts working on the development of the future car in the different engineering departments. The data pool is continuously updated and enriched by means of feedback loops from practical experiments conducted with the digital prototypes.
More rapidly and accurately
“We at Daimler take the digital process more and more as a serious partner for the hardware world,” explains Dragon. “We expect the same from our subcontractors. In early phases, we make a lot of decisions mainly based on simulated results. At the end, it comes to this: the responsible program manager needs to be certain he can trust the obtained simulation results and consecutively make decisions based on them.”
Simulation gives new possibilities to the process of car developing. Brauner adds, “Using hardware-in-the-loop (HIL) or software- in-the-loop (SIL) methods, we are also capable of pinpointing a problem more rapidly and accurately and subsequently informing the subcontractor concerned more specifically about the exact amplitude of a discovered problem. That way we can increase the level of maturity of the first hardware platform prototype. Our vision is to get high quality at the start of each hardware phase, so the work of the test engineers can be focused on the final tuning, in order to match the desired subjective driving experience.”
State-of-the-art methods and processes
To make all of this possible, simulation methods and processes need to be state-ofthe-art, and for a good reason: ultimately, the hardware platform prototype must mirror the driving characteristics expected from the virtual model. Indeed, the ultimate test for all virtual models comes with the first experimental car models built, sent out on the roads in their camouflaged drapes and adhesive tape, in order to keep the new model design a secret as long as possible.
“The first experimental hardware car is ready generally six months after we have finished calculations and defined specs,” says Brauner. “With the first experimental car ready, we are able to start fine-tuning.
This fine-tuning process is a combination of subjective evaluations and objective measurements. The simulation supports these activities in order to find the best solution.”
“We are using our simulation techniques during the whole development process,” continues Dragon. “Thereby we are also looking to improve the existing process. We make a lot of calculations to represent the driving behavior as realistically as possible in an early development phase. I also believe we are very conscientious in our methods.
“We are the only car manufacturer around operating both a ride and a handling simulator. These simulators enable us to evaluate ride and handling well before the first hardware prototype is built. Ride and handling are much about subjective feelings, which are difficult to systematically test.
“Take, for example, the car’s crosswind performance: in testing, it is impossible to have a repetitive and deterministic crosswind on the car. Hence the subjective evaluation of the real car in a systematic way is very difficult because you have to distinguish between the crosswind itself and the car performance.
“With our handling simulator we generate a well-known stochastic crosswind, hence we can subjectively evaluate the crosswind performance of our cars and, even more, we support the development of crosswind assistant systems.”
Template-driven simulation
A key requirement for the ride and handling multi-body simulation tasks at Daimler is the need for a common database of template models of vehicle subsystems. This template database serves a variety of requirements from a broad set of load cases. It starts with kinematic and compliance (K&C) tests on the axle level up to vehicle tests in open-loop and closed-loop maneuvers, such as the ISO lane change, constant radius cornering, J-turn, driving over different road characteristics and single obstacles, and many more. Moreover, the multi-body models must run in real-time to allow ECU testing on HIL setups.
To serve this purpose, the template models of the subsystems are built in a modular fashion and, depending on the load case at hand, the end-user assembles the vehicle, edits the template or load case, brings in the required vehicle data, and runs and postprocesses the simulation.
In total, the ride and handling simulation as part of the DPT process systematically runs DOEs on more than 100 different load cases for each vehicle variant. Each of the ride load cases is preconfigured and can be run interactively or in a fully automated manner. As such, the reliability and accuracy of Simcenter™ 3D for motion simulation software as well as its VisualBasic based automation capabilities make it an invaluable cornerstone of the ride simulation process. A real-time model using Simcenter 3D for motion simulation will transform this feature to the handling process using the HIL simulation method.
Vehicle dynamics
All Daimler development programs are driven by the commitment to the best possible results defined by the “brand star” in terms of perfection, fascination and responsibility. “In the case of vehicle dynamics, the process must enable us to achieve optimal results and make sure we will obtain, for example, the best solution when solving conflicting ride and handling objectives. The classical ride and handling functions are very customer-relevant. Unfortunately these functions are conflicting objectives,” explains Dragon.
“First of all, we want the best possible result. But ride and handling also means you have to find an optimum. A more sportive setup means more agility. A more comfortable setup means more comfort. The target is set in the product brief. Model-based engineering enables us to find the best solutions for this tricky problem and to refine existing solutions, already starting in a very early phase in the development process. With this digital process, we lay the basics for hardware testing. In addition, we support the hardware driven development process by special analysis.”
Solving the conflict between ride and handling
Building a digital ride and handling model up to the task of mimicking reality is a complex job. A car’s ride and handling behavior is influenced by a variety of the vehicle’s mechanical components: tires, suspension, shock absorbers, engine mounts, seat, steering, body, engine, aerodynamics, and drive train. So it is a big issue to separate the derivatives of a platform not only by design but also by the vehicle behavior that results in a different ride and handling performance.
Dragon notes, “The development of the new A-class, B-class, CLA, GLA and CLAShooking Brake has been heavily influenced by ride and handling simulations. Although the cars share many components, the customer will notice huge differences between the models, not only on the design side, but also on the driving experience side.”
More and more, this is complemented by the vehicle’s dynamic control systems including active suspension such as active body control (ABC) and continuous damping control (CDC), brake assistance, lane departure protection and electrical power steering.
Controls
“Active systems have considerable possibilities to enlarge our degrees of freedom when addressing the conflict between ride and handling properties,” says Brauner. “The development of these systems goes hand-in-hand with the development of the car itself.
“The active systems enable us to go a long way on either side, without giving in on the other. Our ability consists of creating the driving experience we exactly want to target the market. Therefore our simulation tool has to have all options to simulate the vehicle dynamics in a realistic manner. Of course, this approach includes active control systems in a HIL environment without switching from an MBS tool to a special realtime vehicle dynamic software program.
”The integrated software of the control systems are produced by different subcontractors, so not only the integration of every system individually is simulated and tested, but also the combined behavior of all integrated assistance systems. All these controls are systematically analyzed, using HIL and SIL.
Finally, in order to put the virtualized car model to the real test, even more model components are needed, defining possible different passenger, driver and road scenarios.
Legal compliance
By now, model-based prototyping and model-driven testing have become part of Daimler’s automotive development approach. Car models are designed right down to the detailed level as data models. New models are always developed starting from a validated model of the existing car and, subsequently, changes are made. For some new components, three-dimensional models are generated very early in the cycle as the basis for demonstrating and testing feasibility using the so-called rapid prototyping process. When all components are assembled into a complete model, the newly modeled car is simulated on test rigs.
Today, the performance of real-time handling models is not only used for the continual testing and optimization of the car through successive development stages, but also to confirm compliance with ratings and the legal requirements.
New markets, specific adjustments
Ride and handling expectations differ from country to country. “Our aim is to develop every car to such standards that it will be adjustable to all different markets,” says Dragon.
Enabling adjustability for different market needs is part of the Daimler DPT-process. “Fine-tuning is performed locally according to the customers’ expectations and the road conditions,” notes Dragon. “For this, we propose different settings for each country. We listen to our customers. For example, U.S. customers don’t want us to build an American car. They expect a Mercedes-Benz to behave as a European car. But of course, specific adjustments are made specifically for the U.S.: values for lateral dynamics differ, for example.” The same approach is deployed in new markets such as China and India: cars are adjusted according to the expectations of the customer. For example, in China, MercedesBenz car models are also available in a longer wheel base version. Also, road conditions have to be taken into account. Chinese and Indian road conditions differ quite a lot from those in Europe. These new markets also increase the variety of load cases engineers have to consider during development and stretch technical demands.”
Grossmann adds, “Today we use maybe ten road types to simulate ride behavior. But in the future, we will presumably simulate from 20 to 50 different road cases. At that point the number of simulations will increase very significantly, since driving behavior on all of these different roads will have to be simulated at different speeds, loads, wind conditions, etc.”

The new car markets like China and India increase the variety o f load cases considered during development, stretching technical demands.
Simcenter 3D for motion simulation
With the number of scenarios simulated, the amount of results generated increases. “We generate huge amounts of data, running tens of load cases fully automated using Simcenter 3D for motion simulation automation capabilities. Generating all this data is easy, but then it comes to their analysis and evaluation, which demands a lot of effort,” says Dragon. “The challenge is to pick the most relevant data out of that huge amount. In order to accelerate this process, we have automated the data selection process. These automated jobs are processed weekend after weekend. This means that all data needs to be available for every load case simulated and thus the solver needs to be very stable and checkable.
“Building cars without simulation has become a more and more inconceivable task. When it comes to ride and handling, Simcenter 3D for motion simulation is a powerful development tool. It has a very stable solver and delivers great quality and reliability. Simcenter 3D for motion simulation is our basic tool to measure and describe ride characteristics up to 30 hertz (Hz). The possibility to incorporate FE (finite element) meshes and to combine FE meshes with, for example, controls and tire characteristics presents a real added value to our development program.”
Dragon also expresses some wants: “In the future, we will see more and more control systems. As a result, ‘Hardware in the Loop’ simulations will become more important. It is our ambition to also use the Simcenter 3D solver for this, requiring the solver to run Daimler vehicle models in a deterministic, real-time mode, without making simplifications of the model topology. That will allow us to use the same vehicle models for handling as well as for ride comfort simulation. We also strive to fully integrate our simulation tools seamlessly into our large data system, in order to be able to interfere more directly in the documentation of the components themselves. Thus interchangeability of data becomes a more important attribute.”
Daimler’s state-of-the-art ride and handling simulators
The ride and the handling simulator at the Sindelfingen Mercedes Technology Center enable developers to subjectively evaluate systems and components of future Mercedes models very early in the development phase, with a realism close to perfection and long before hardware prototypes are built.
The car is linked to the control center through a direct data feed. All acceleration, braking and steering information is directly fed into the control center’s computer and registered. The computer recalculates the driving behavior of the car more than a thousand times a second and translates this into the motion of the simulator, simulating the car’s attitude on the road: for example, body roll during fast cornering. Lane changes are simulated by moving the simulator along a 12-meter long rail. Meanwhile, a 360 degree screen displays the road, landscape and surrounding traffic.
The ride simulator is located in the same building as the handling simulator. The ride simulator is used to replay simulated or measured accelerations of the drivers and passengers seat. The ride simulator is able to reproduce signals up to 30 Hz. Simulation results can be compared to the ride behavior of existing cars, including competitor cars. In addition, the combination of the handling and ride simulators gives the opportunity to subjectively evaluate the conflicting targets of ride and handling.

With its 360 degree screen, fast electric power system and a 12-meter long rail for transverse movements, the handling simulator at the Mercedes Cars Development Center in Sindelfingen makes it possible to test drive and assess handling characteristics of future vehicles in full.

With its fast electric power, the ride simulator at the Mercedes Technology Center at Sindelfingen makes it possible to test drive ride characteristics of future vehicles in full.
The Simcenter 3D for motion simulation solver, combined with the automation capabilities offered, represents an invaluable cornerstone of the driving dynamics simulation process at Daimler.
Mercedes Technology Center